RDP2-(Q)-J3-30儲罐防凍恒功率電伴熱解決方案 新疆電伴熱帶應用

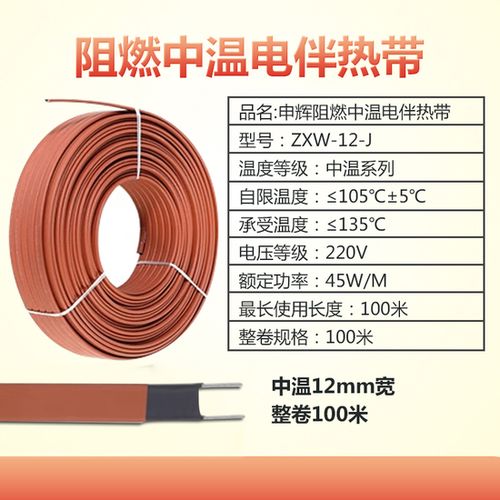
RDP2-(Q)-J3-30儲罐防凍恒功率電伴熱系統是專為新疆等嚴寒地區儲罐防凍需求設計的高效電伴熱產品。該系統采用恒功率電伴熱帶,確保在低溫環境下穩定運行,有效防止儲罐內介質凍結,保障化工、石油等行業的安全生產。
在新疆等極端氣候地區,冬季氣溫可能驟降至零下數十度,儲罐內液體易發生凝固,導致管道堵塞或設備損壞。RDP2-(Q)-J3-30電伴熱系統通過均勻發熱,維持儲罐壁及內部介質在安全溫度范圍內。其核心優勢包括:恒功率輸出,避免溫度波動;耐腐蝕設計,適應化工環境;安裝簡便,適用于各種儲罐結構。
該系統采用優質橡塑絕緣材料,具有優異的耐高溫和防水性能,確保在惡劣環境下長期可靠運行。廣泛應用于化工儀器、石油儲運等領域,為企業的冬季運營提供關鍵保障。供應商通過中國化工儀器網等平臺,為用戶提供全面的技術支持和定制服務,助力行業應對嚴寒挑戰。
如若轉載,請注明出處:http://m.dr68.cn/product/34.html
更新時間:2026-04-18 19:35:40